Lenco v.2

Autor robota : Andrej Lenčucha
Do sezóny 2013 som sa rozhodol vstúpiť so zdokonaleným minuloročným modelom. Subjektívne sa robot pohybuje plynulejšie a nedostáva sa často do šmyku.
Je určený predovšetkým na vysoko-rýchlostné sledovanie čiary v kategóriách stopár – linefollower ( aj enhanced ).
Hlavné črty :
- 32-bitový procesor ARM Cortex M3 pracujúci na frekvencii 96MHz
- 32KB RAM
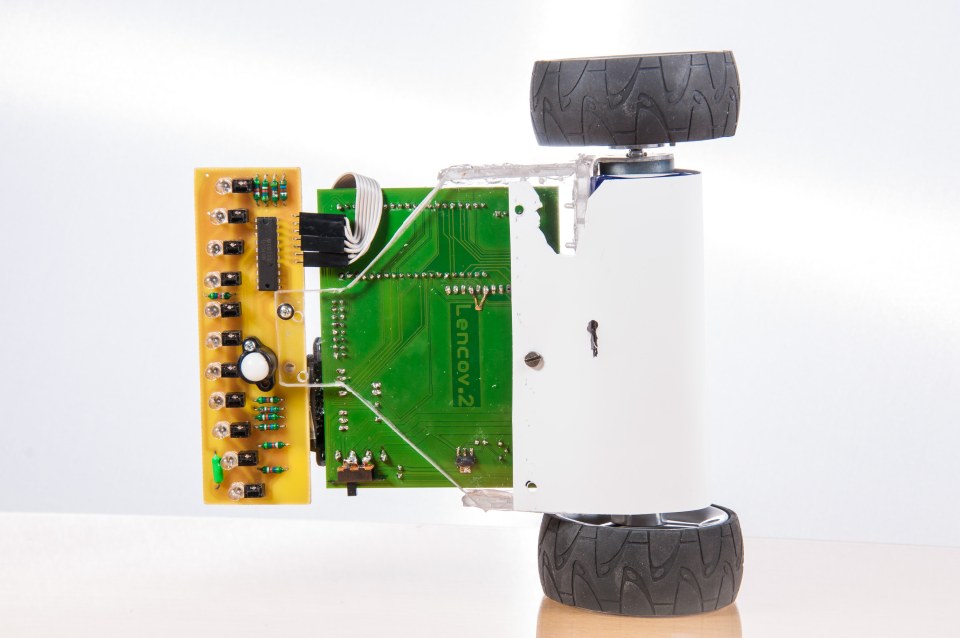
- Konštrukcia z plexiskla
- TLC521IN ADC prevodník s 11 kanálmi na spracovanie signálu z QRD 1114 senzorov sledujúcich čiaru
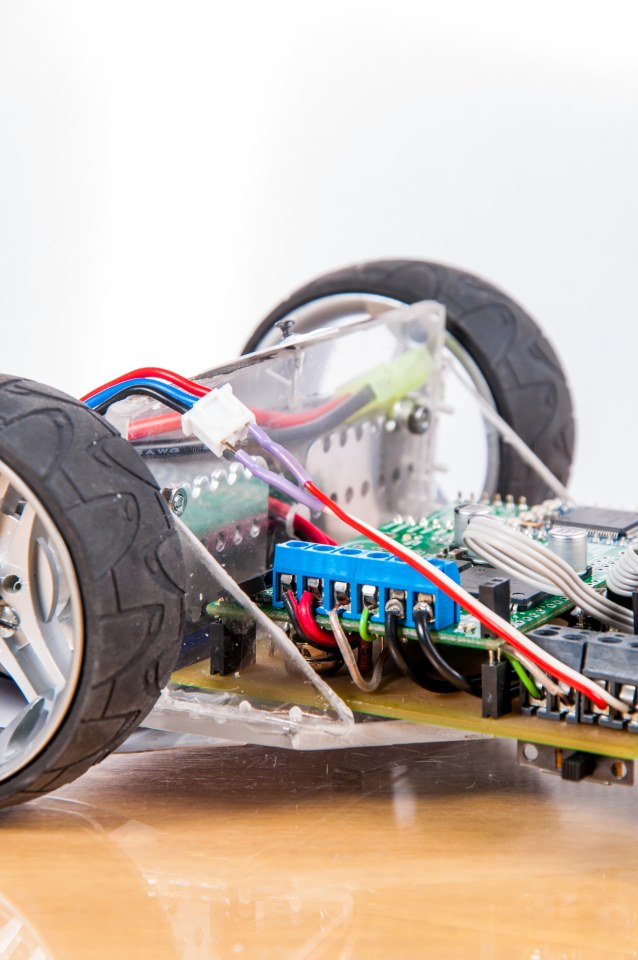
- 2x VHN5019 výkonné 30A mostíky využité pre riadenie motorov
- 7,4V Li-Po batéria
- Sharp IR proximitný senzor
- 9-osý polohový senzor (gyroskop, akcelerometer,magnetometer)
Tento model prebral veľa komponentov od jeho staršieho brata F.A.T. Výraznou inováciou je výmena kolies s lepšou priľnavosťou, silnejšie motory a nové mostíky na riadenie motorov.
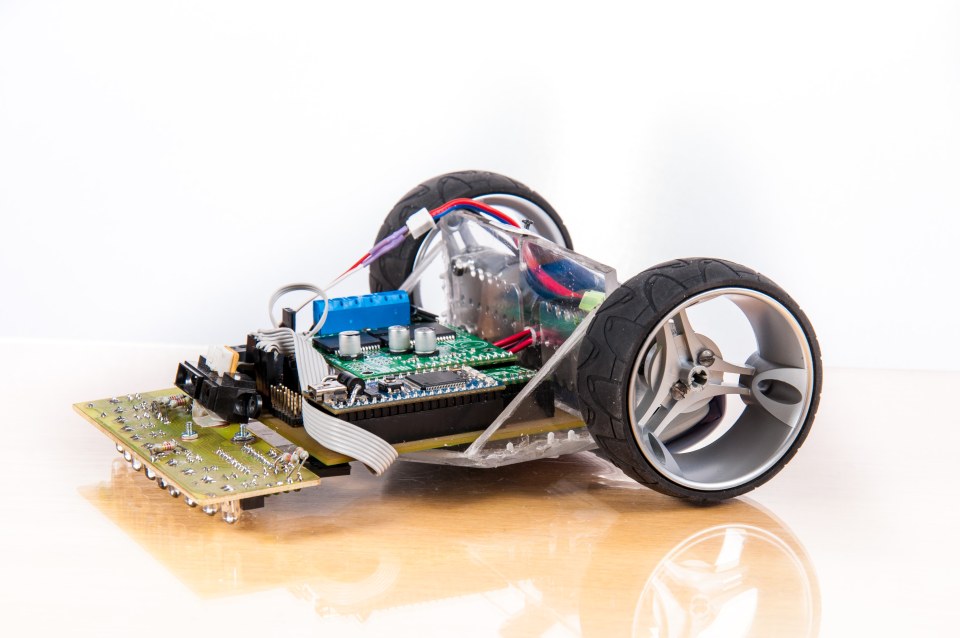
Ďalej bola prepracovaná konštrukcia s cieľom znížiť ťažisko na minimálnu úroveň. Robot sa zdá byť na pocit ťažký, má hmotnosť 604g, pričom 502 gramov pripadá na kolesá a 102g na všesmerovú guľôčku.

Zmeny sa dotkli aj plošného spoja, ktorý predovšetkým prepája a drží pohromade mikrokontrolér, mostíky a senzory. Na túto úlohu stačila jedno-vrstvový doska.
Softvér je napísaný v jazyku C++. Oproti predchádzajúcemu modelu sa zvýšila frekvencia čítania čiary na približne 300hz, teda pri maximálnej rýchlosti dosahujeme vzorkovanie každých 5,5mm.
Na záver pripájam dôkaz toho, že konštrukcia sa vyvíja iteratívnym spôsobom, teda ju stále prestavujem a zdokonaľujem. Tu je o niekoľko týždňov staršia verzia :


sponzori a partneri




Leave a Reply
You must be logged in to post a comment.