Robot SAMara

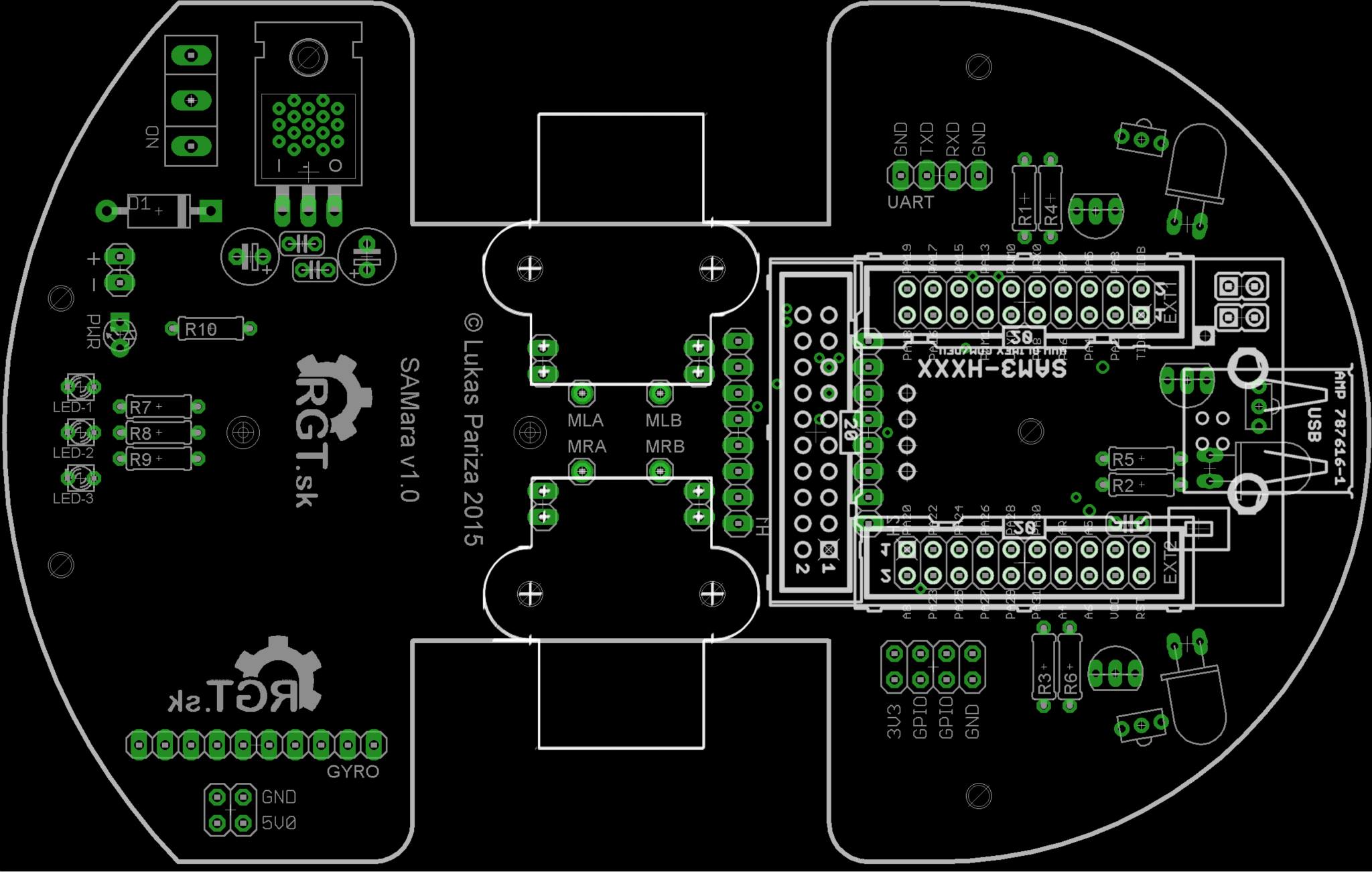
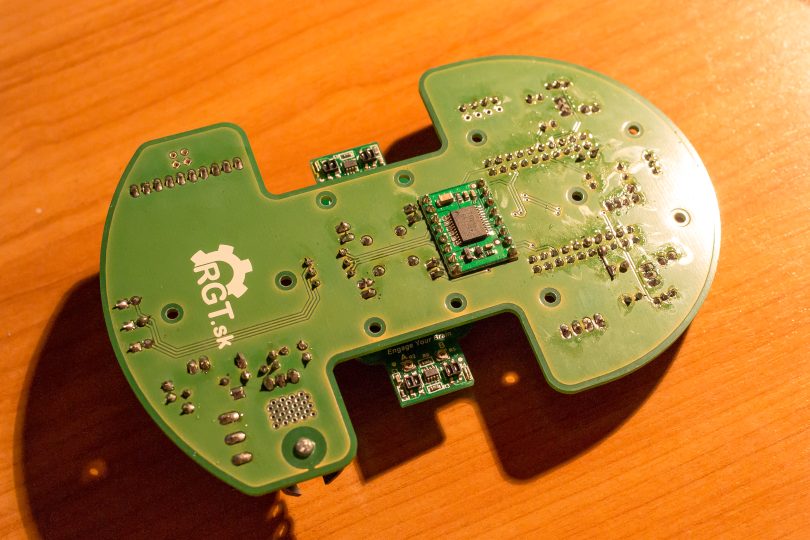
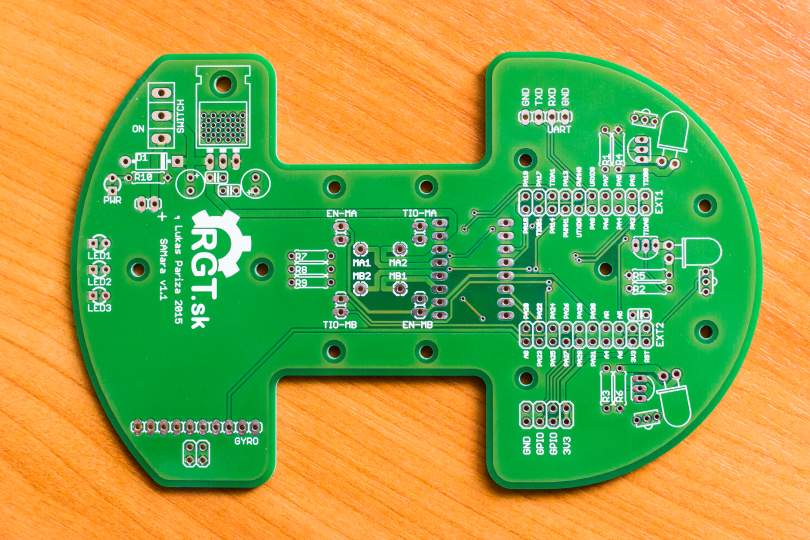
Už dlhšiu dobu som plánoval, že výtvorím nový robot postavený na odlišnom mikrokontroléri, aký som používal doteraz. Tentokrát to je SAM3S od Atmelu, ktorý je použitý na mojej vývojovej doske. Vytvoriť robot s jasne určenými parametrami je dobrý spôsob, ako sa naučiť pracovať s novým procesorom a novým prostredím, tak som sa pustil do práce. Najskôr bolo potrebné naštudovať si zapojenie pinov na vývojovej doske, otestovať základné periférie a mohol som sa pustiť do návrhu konštrukcie a elektroniky. Ako je u mňa už overeným zvykom, konštrukcia pozostáva primárne z plošného spoja, na ktorom sú osadené všetky potrebné komponenty.


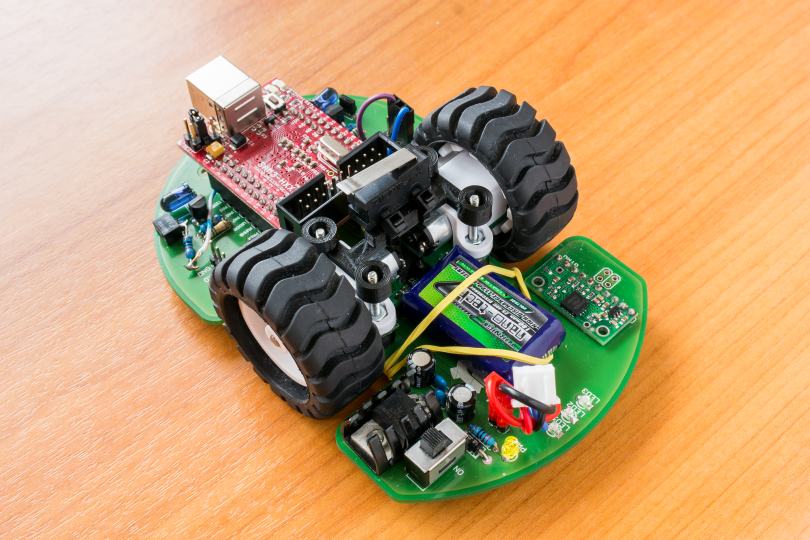
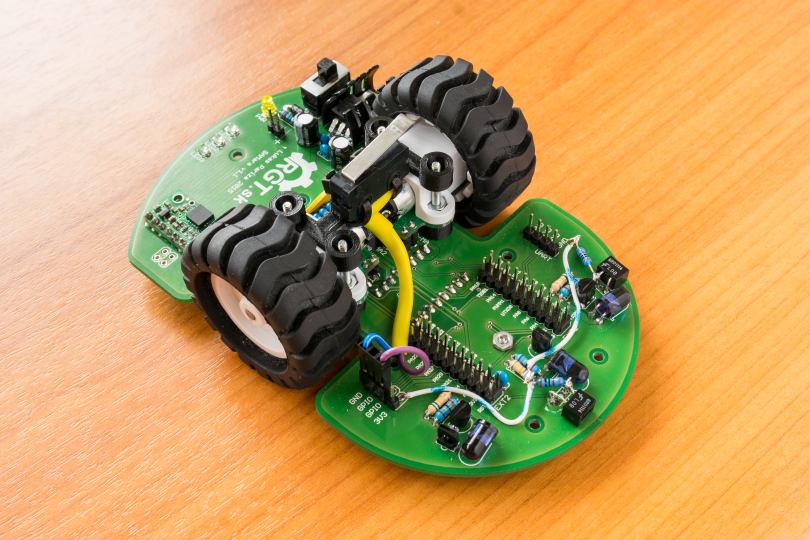

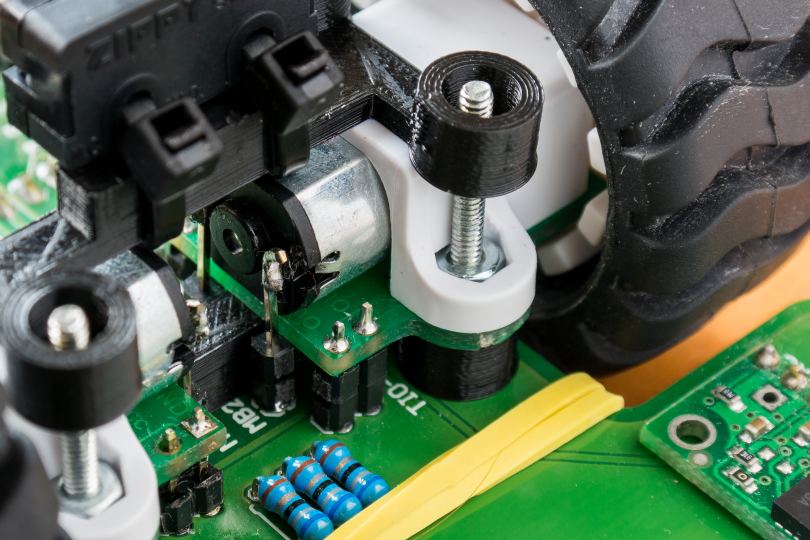
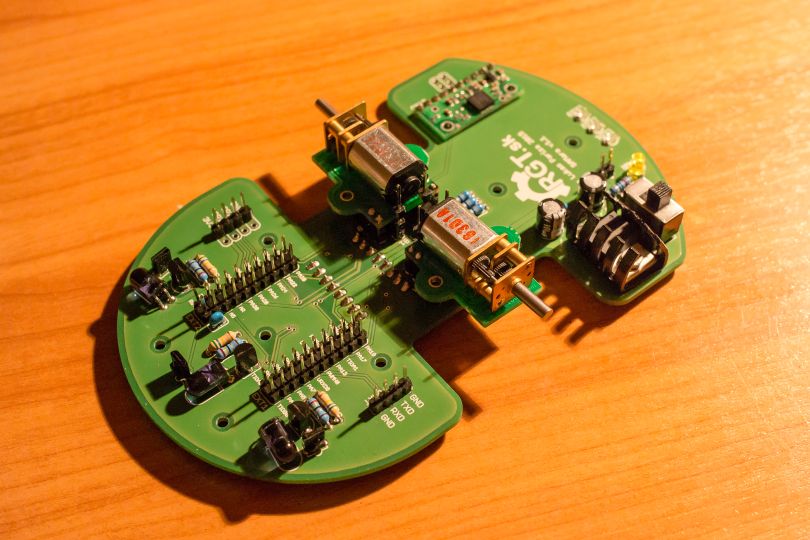

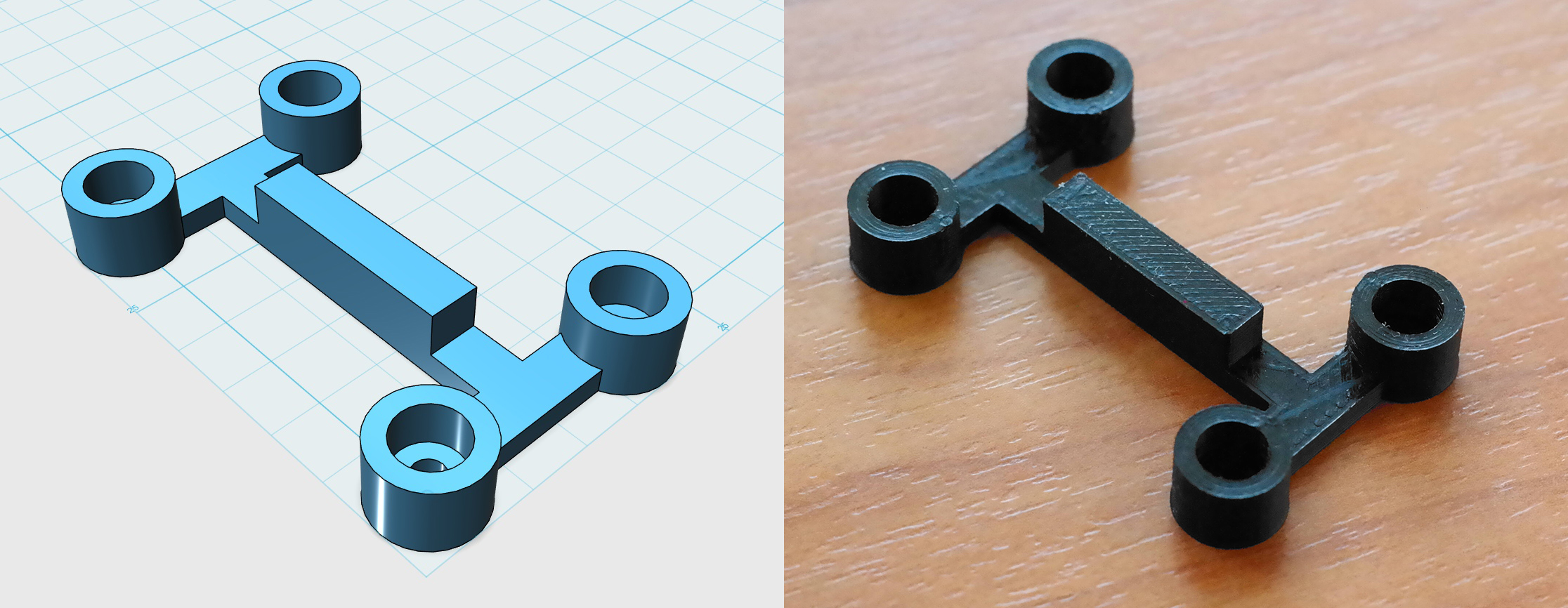
Prvýkrát som mal možnosť využiť 3D tlač, čo mi padlo veľmi vhod pre výrobu podložky pod motory s enkodérmi. Bolo potrebné zabezpečiť, aby sa motory nachádzali v správnej výške a aby bol tiež priestor na spoje medzi motormi, enkodérmi a plošným spojom.
-

- SAMSUNG CSC
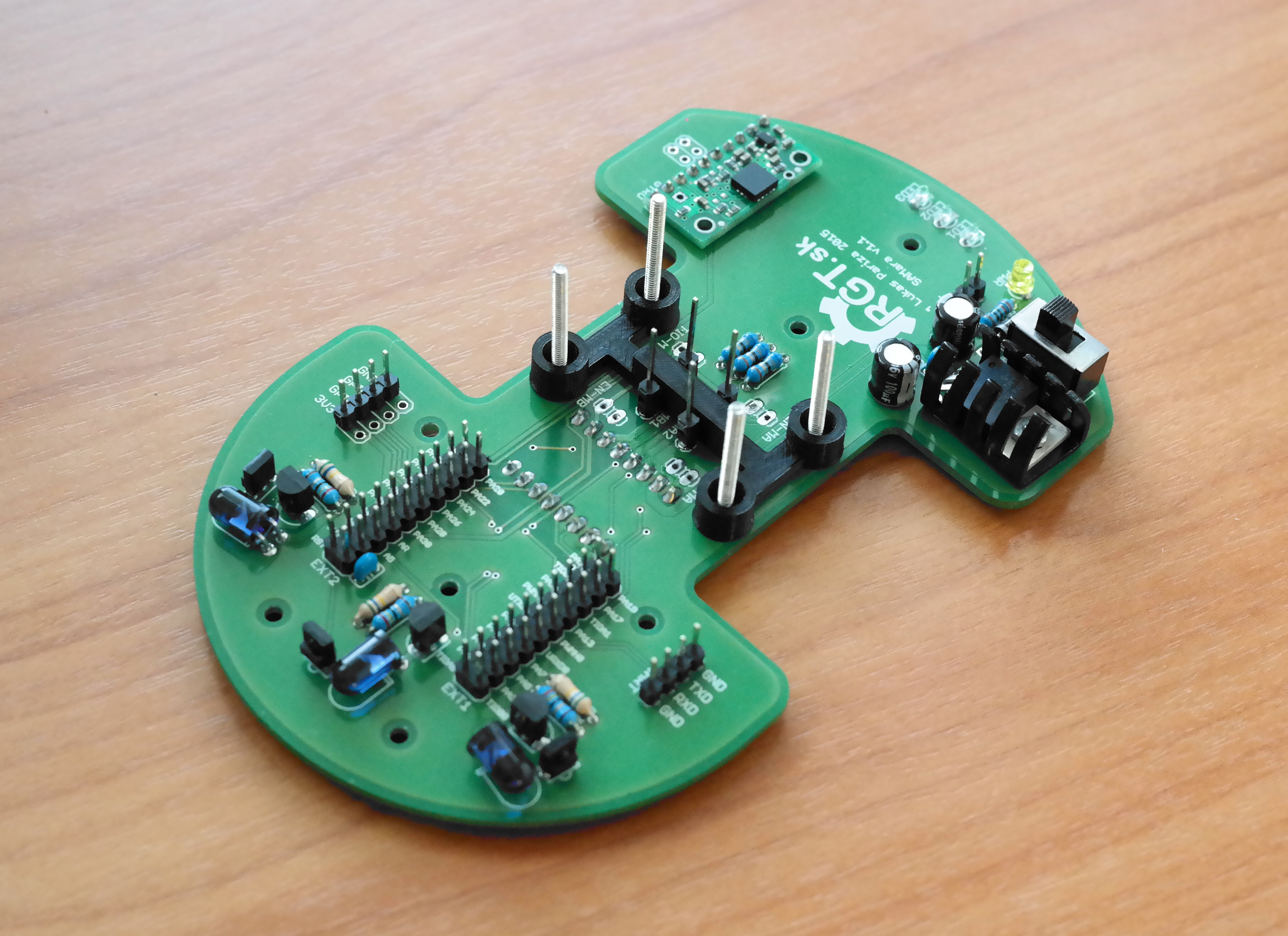
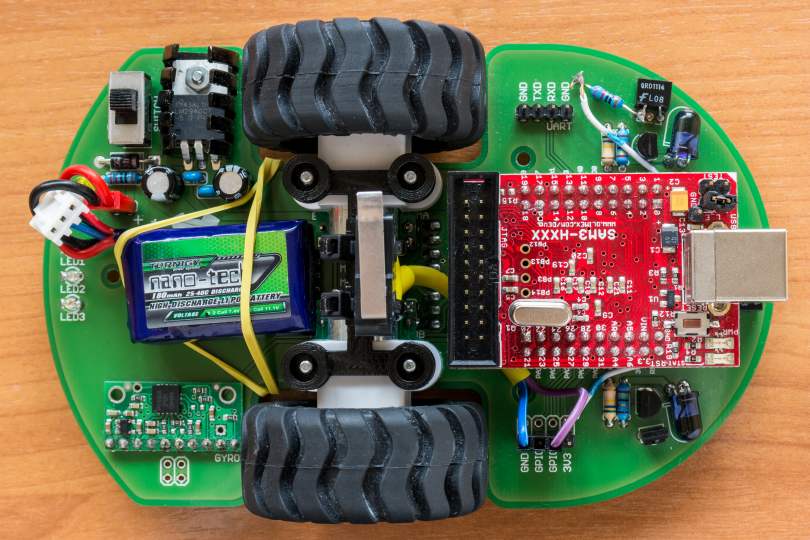
Keďže tento robot bol od začiatku považovaný len za nejaký medzistupeň pri prechode medzi platformami, dal som si za úlohu účasť v kategóriách Myš v bludisku a RoboCarts. V oboch prípadoch je najdôležitejšie vedieť snímať vzdialenosť od mantinelov. Tomu sú prispôsobené senzory robota. V prednej časti sa nachádzajú 3 infračervené senzory vzdialenosti, z ktorých jeden smeruje dopredu a zvyšné dva do pravej a ľavej strany. Medzi snímačmi je tiež možné nájsť jeden dvoj-osý gyroskopický senzor a optické enkodéry.
Špecifikácie robota:
- Atmel SAM3S4B
- 64 MHz, 48 kB RAM, 256 kB Flash
- 3x IR senzor na vzdialenosť
- 1x dual axis gyro
- 2x optický enkodér
- 2x Pololu Micro Metal Gearmotor (jednosmerné motorčeky s prevodovkami)
- 1x 7,4 V LiPol, 180 mAh batéria
- programovaný v C (Atmel Studio)
Videá:
Úspechy robota:
- 1. miesto, RoboCarts, Robotic Day 2015, Praha

sponzori a partneri




Leave a Reply
You must be logged in to post a comment.