Andrej Lenčucha
Moje začiatky v oblasti robotiky siahajú do čias navštevovania základnej školy, kde ma zaujal krúžok práce s programovateľnou stavebnicou Lego. Tu sa mi dostali základy ikonografického programovania. Ovocím práce v tomto krúžku boli prvé úspechy na miestnych súťažiach, ktoré boli nasledované nemenej úspešnou reprezentáciou počas štúdia na gymnáziu. Vďaka týmto úspechom som sa dostal na rôzne medzinárodné súťaže v rôznych krajinách, ako Nemecko, USA, Čína, Rakúsko, Poľsko a Singapur.
Momentálne študujem odbor Informatika na Fakulte Informatiky a Informačných Technológií na Slovenskej Technickej Univerzite v Bratislave, vďaka čomu mám čoraz širší obzor v oblasti algoritmizácie, programovanie a informačných systémov, obzvlášť využiteľné pri programovaní robotov.
Okrem robotiky sa vo voľnom čase venujem predovšetkým mojej priateľke, umeleckej a reportážnej fotografii, technologickým novinkám a prieskumu zeme pomocou detektorov kovov a pôdneho radaru.
Mám veľmi rád lyžovanie, plávanie, volejbal, bedminton a varenie 🙂

Robotic Day 2017

Dlho sme sa pripravovali a víkend 24.-25.6.2017 nakoniec prišiel. Nastúpili sme tam s 3 robotmi (Jeton, Lenco a Nite 4). Jeton súťažil v RoboCarts, Nite 4 v RoboCarts a Linefollower a Lenco v Linefollower kategórii. Súťažilo sa počas celého víkendu, čo bolo pomerne náročné. Naša účasť bola veľmi úspešná, kde sme na čiare získali 1. miesto a v RoboCarts 1. aj 2....
read more2016 – zhrnutie

Konečne som si našiel čas napísať pár riadkov o sezóne 2016. Dlho tu žiadny príspevok nebol, no neznamená to, že sme od robotiky upustili. Len starostí a radostí je viac a viac, preto je pre nás náročné informovať o dianí v RGT častejšie. Nové máme 2 roboty a hlavného sponzora – Valeo. Ja som zostrojil robota Nite 4 a Sisa s Ahmedom robota Steve. Hneď sme ich pokrstili na prvej minuloročnej súťaži, a tou bola tradične RobotChallenge 2016 vo Viedni. RobotChallenge 2016 12.-13.3.2016, Viedeň, Rakúsko Postup do finále, Linefollower...
read moreRGT v Rusku

V septembri sa v ruskom Petrohrade konal medzinárodný robotický festival RoboFinist. Toto podujatie je organizované nadáciou Finist a Prezidentským Lýceom Fyziky a Matematiky #239. Zúčastnilo sa ho viac než 850 súťažiacich prihlásených do 28 rôznych disciplín. Medzi nich patrila aj posádka nášho družstva RGT. V tomto článku by sme sa chceli podeliť o naše zážitky z tejto súťaže. O takejto možnosti sme sa dozvedeli na RobotChallenge 2015 vo Viedni, kde nás oslovili súťažiaci z Ruska a pozvali nás prísť si zasúťažiť aj k nim. Pôvodne sme tam...
read moreČo znamená „mať na výber“

Pred rokmi ste pri výbere kávy mali možnosti „áno“ alebo „nie“. Dnes je v ponuke bežne aj dvadsať druhov. Robí to náš život kvalitnejším? Všetci si prajeme mať čo najviac alternatív, aby sme si mohli najlepšie vybrať a skvalitňovať si tak život. Aké úžasné to musí byť, keď sa môžeme zariadiť ako chceme my, môžeme si vybrať presne to, čo potrebujeme. Mať na výber sa najčastejšie rozumie ako sloboda v rozhodovaní. Keď sa môžeme rozhodnúť, máme pocit kontroly nad situáciou. Vyberáme si školu, kamarátov, aktivity, predmety v škole, prácu alebo aj...
read moreRGT v roku 2014

Po dlhšej odmlke spôsobenej našimi školskými povinnosťami (Rafael – maturity, Andrej – bakalárska práca, Lukáš – diplomová práca) sa znovu ozývame s informáciami o našom počínaní v robotickej sezóne 2014. Ako je už tradíciou, začali sme na konci marca vo Viedni. Tamojšia RobotChallenge 2014 bola doposiaľ najväčšia v histórii. V 15-tich disciplínach medzi sebou súťažilo 574 robotov zo 46 rôznych krajín sveta. Snáď okrem Antarktídy mal na súťaži zastúpenie každý svetadiel 🙂 My sme súťažili v kategórii Linefollower...
read morePostup na Freescale Cup 2014 v Nemecku!

V piatok 7. marca 2014 sa v Žiline stretli nadšenci inteligentných autíčok zo Slovenska, Českej republiky a Poľska . Konal sa tam už 3. ročník súťaže The Freescale Cup 2014. Úlohou súťažiacich bolo skonštruovať a naprogramovať inteligentné autíčko tak, aby dokázalo prejsť dráhu určenú čiernou čiarou na bielom podklade čo najrýchlejšie. Súťažiaci ale musia použiť predpísaný podvozok a mikroprocesor Freescale. Dráha je typicky snímaná riadkovou kamerou, no niektoré roboty kombinovali aj infračervené senzory. Osemnásť zúčastnených tímov bojovalo...
read moreLenco v.2

Autor robota : Andrej Lenčucha Do sezóny 2013 som sa rozhodol vstúpiť so zdokonaleným minuloročným modelom. Subjektívne sa robot pohybuje plynulejšie a nedostáva sa často do šmyku. Je určený predovšetkým na vysoko-rýchlostné sledovanie čiary v kategóriách stopár – linefollower ( aj enhanced ). Hlavné črty : 32-bitový procesor ARM Cortex M3 pracujúci na frekvencii 96MHz 32KB RAM Konštrukcia z plexiskla TLC521IN ADC prevodník s 11 kanálmi na spracovanie signálu z QRD 1114 senzorov sledujúcich čiaru 2x VHN5019 výkonné 30A mostíky využité...
read moreFungovanie PID
Algoritmus PID (proportional-integral-derivative) v reálnom čase vypočítava, ako prudko má robot zatáčať, na základe troch zložiek; proporčnej, integrálnej a derivačnej. Môže to znieť akokoľvek odstrašujúco, k naprogramovaniu PID riadenia nepotrebujeme poznať nejaký komplikovaný matematický aparát. Potrebujeme získať hodnotu proporčnej zložky. Ide o nejaké číslo, ktoré reprezentuje polohu sledovanej čiary pod poľom senzorov, pričom ak sa sledovaná čiara nachádza v strede robota, robot má pokračovať rovno, jej hodnota je 0. Na základe...
read moreF.A.T.
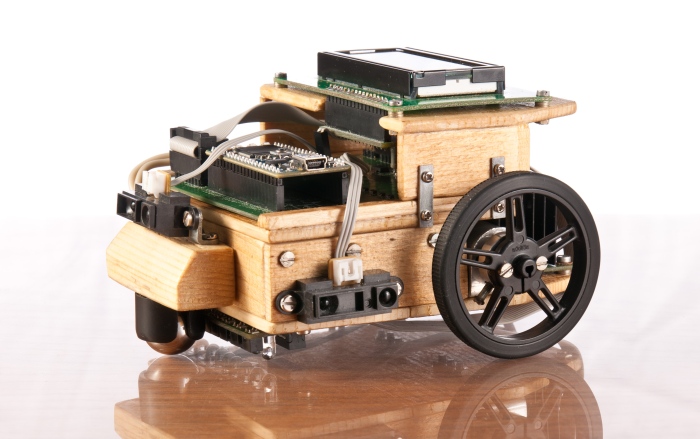
Základom tohto prototypu je prototypná doska mbed LPC 1768, ktorá predstavuje šikovné riešenie aj pre začínajúcich nadšencov robotiky. Disponuje všetkými potrebnými rozhraniami, dokonca aj USB host portom a ethernetom. Hlavné črty : 32-bitový procesor ARM Cortex M3 pracujúci na frekvencii 96MHz 32KB RAM 512KB ROM 200MHz multiplexery využité pri čítaní analógových signálov 2x LM6203 využité pre riadenie motorov 34Wh Li-Po batéria 2x Sharp IR proximitné senzory, a QRD 1114 na sledovanie čiary Elegantná lakovaná drevená konštrukcia...
read moresponzori a partneri



