Rafo

Autor modelu : Rafael Gajanec
Posledným výsledkom doteraz nazbieraných skúseností a vedomostí je robot Rafo, kreatívne pomenovaný podľa autora. Cieľom bolo vytvoriť model vhodný na viacero súťažných disciplín po pridaní alebo odobraní niekoľkých drobných modulov. Po nahodení správnej softvérovej konfigurácie dokáže robot pomerne rýchlo zvládnuť základnú disciplínu – linefollower.
Pridanie modulu so senzormi na snímanie prekážok ho zmení na pomerne sofistikovaného riešiteľa rovnakej kategórie s prekážkami, ako sú tehly, mostíky a tunely. Ďalší doplnok, rameno, úplne zmení nielen základný vzhľad, ale aj zdvihne latku náročnosti disciplíny na hľadanie plechovky od piva naplnenej na 150g a manipuláciu s ňou.
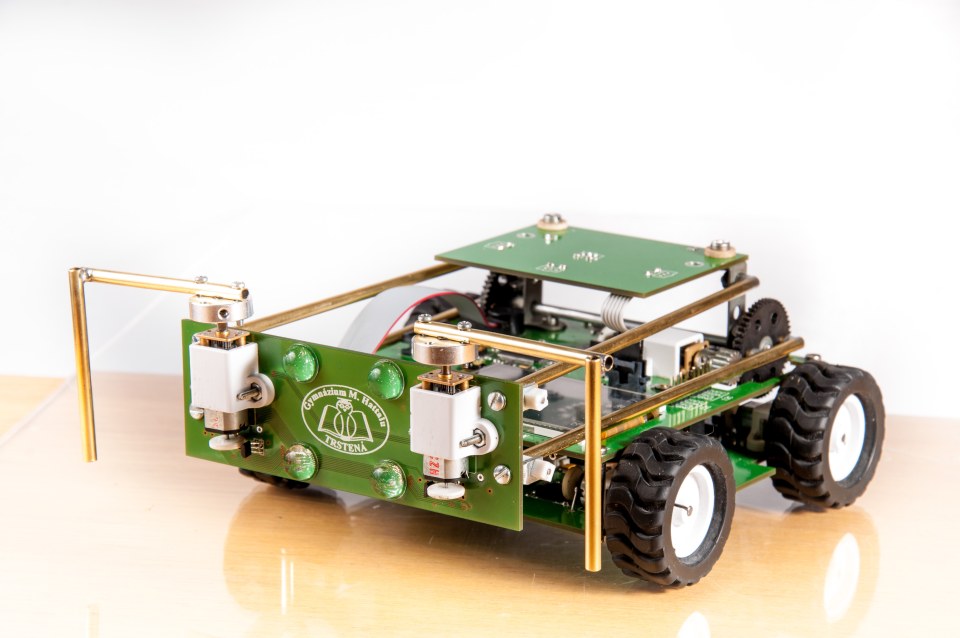
Posledná zatiaľ podporovaná zmena je pridanie bezkontaktného infračerveného teplomera, ktorým má v jednej konkrétnej súťažnej disciplíne lokalizovať teleso zohriate na 37°C

robot je vybavený:
- “dvojjadro” LPC1769, podtaktované na frekvenciu 96MHz
- 32kB RAM
- 512kB FLASH
- externý 16-kanálový AD prevodník so vzorkovacou frekvenciou 1Msps (mega samples per second)
- 12 fotoranzistorov – senzorov na snímanie povrchu, napríklad čiary

- 4 optické senzory na meranie vzdialenosti
- voliteľné 2+2 dotykové senzory
- 2 Li-Ion 18650 články s kapacitou približne 19Wh
- až 7 motorov – 4×4 pohon, ďalšie tri sú na rameno
- 320×240 farebný dotykový display
- gyroskop a akcelerometer v jednom
- senzory hallovho javu na monitorovanie činnosti motorov
- digitálne potenciometre na nastavenie citlivosti fototranzistorov
- 2 externé I2C porty na pripojenie napríklad kompasu, gps a podobne
- čítačka mikro SD kariet
- 4Mb FLASH pamäť
- monitoring napájania – meranie napätie na článkoch a odberového prúdu
- senzor okolitého osvetlenia
- záložné napájanie “hodiniek”
- 36kHz IR dekóder, napríklad na ovládanie pomocou TV ovládača
- hardvérova funkcia je “killswitch” – robot je schopný vypnúť sám seba
- robot je “xBee ready”
Zaujímavosti:

robot bol navrhnutý v profesionálnom CAD systéme Altium Designer. Koncept vychádza z polovice nepodareného minuloročného predchodcu.
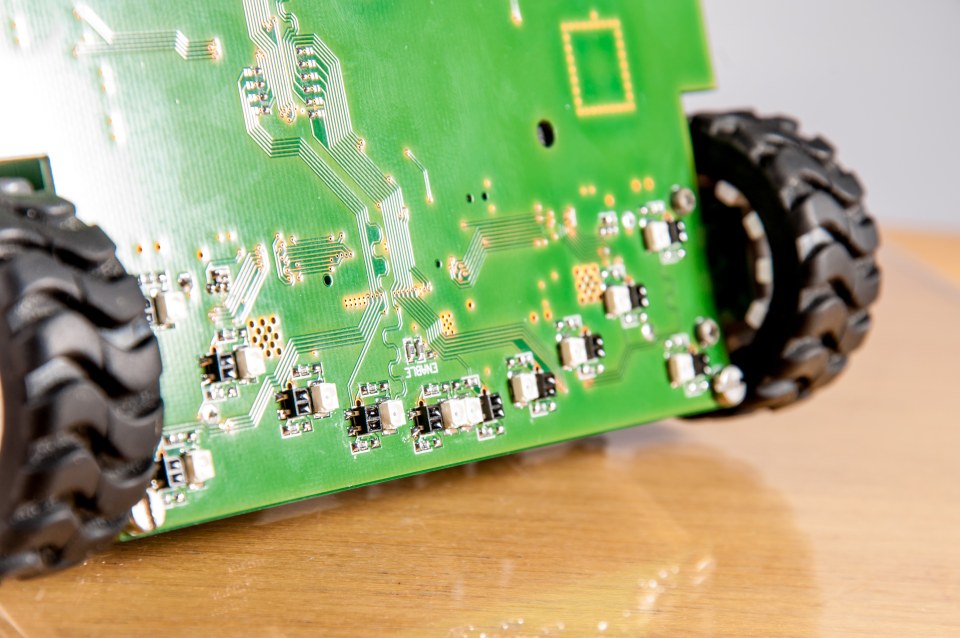
Program v C++ na vypísanie “Hello World” na display má vyše 1000 riadkov (nerátajúc použité štandardné knižnice). Celý robot je ručne osádzaný, vrátane púzdier ako QFN24, alebo miniatúrnych 0402 pasívnych súčiastok
čiastočne sú na niektoré mechanické časti použité diely zo stavebnice Merkur. Návrh schém a dosiek plošných spojov revízie trval pol roka (môj prvý projekt v Altium Designer)
robot bude použitý na GMH na vzdelávacie účely, kým ho niekto nepokazí :-).


sponzori a partneri




Leave a Reply
You must be logged in to post a comment.