
Lenco v.2
Autor robota : Andrej Lenčucha Do sezóny 2013 som sa rozhodol vstúpiť so zdokonaleným minuloročným modelom. Subjektívne sa robot pohybuje plynulejšie a nedostáva sa často do šmyku. Je určený predovšetkým na vysoko-rýchlostné sledovanie čiary v kategóriách stopár – linefollower ( aj...
Fungovanie PID
Algoritmus PID (proportional-integral-derivative) v reálnom čase vypočítava, ako prudko má robot zatáčať, na základe troch zložiek; proporčnej, integrálnej a derivačnej. Môže to znieť akokoľvek odstrašujúco, k naprogramovaniu PID riadenia nepotrebujeme poznať nejaký komplikovaný...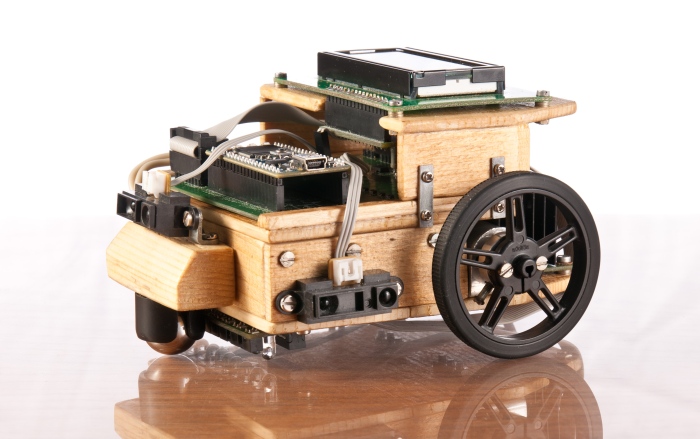
sponzori a partneri



