
Lenco v.2
Autor robota : Andrej Lenčucha Do sezóny 2013 som sa rozhodol vstúpiť so zdokonaleným minuloročným modelom. Subjektívne sa robot pohybuje plynulejšie a nedostáva sa často do šmyku. Je určený predovšetkým na vysoko-rýchlostné sledovanie čiary v kategóriách stopár – linefollower ( aj...
Rafo
Autor modelu : Rafael Gajanec Posledným výsledkom doteraz nazbieraných skúseností a vedomostí je robot Rafo, kreatívne pomenovaný podľa autora. Cieľom bolo vytvoriť model vhodný na viacero súťažných disciplín po pridaní alebo odobraní niekoľkých drobných modulov. Po nahodení správnej...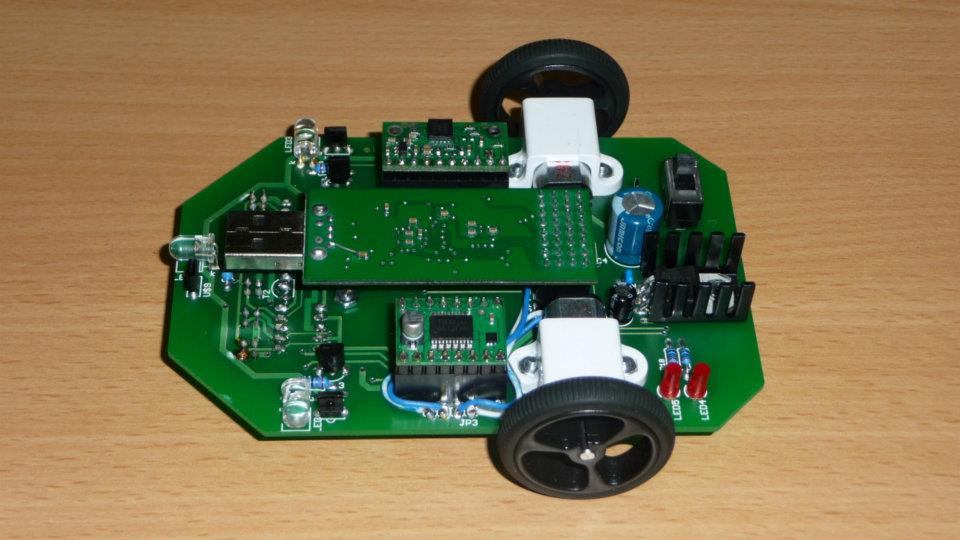
Robot Nite 3
Práce na tomto robotovi začali v roku 2011 s plánovanou účasťou na súťažiach v roku 2012. Hlavnými zámermi pri vývoji bolo zjedodušiť konštrukciu, znížiť váhu a položiť nižšie ťažisko robota. Okrem týchto zmien však prišlo v porovnaní s robotom Nite 1 aj mnoho ďaľších, ako napríklad nový...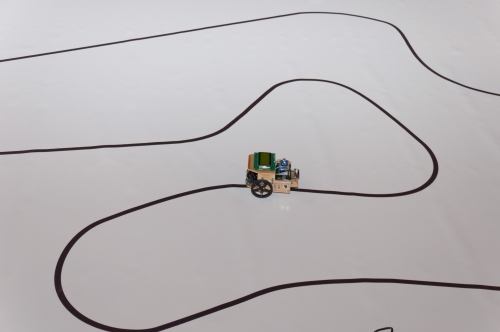
Fungovanie PID
Algoritmus PID (proportional-integral-derivative) v reálnom čase vypočítava, ako prudko má robot zatáčať, na základe troch zložiek; proporčnej, integrálnej a derivačnej. Môže to znieť akokoľvek odstrašujúco, k naprogramovaniu PID riadenia nepotrebujeme poznať nejaký komplikovaný...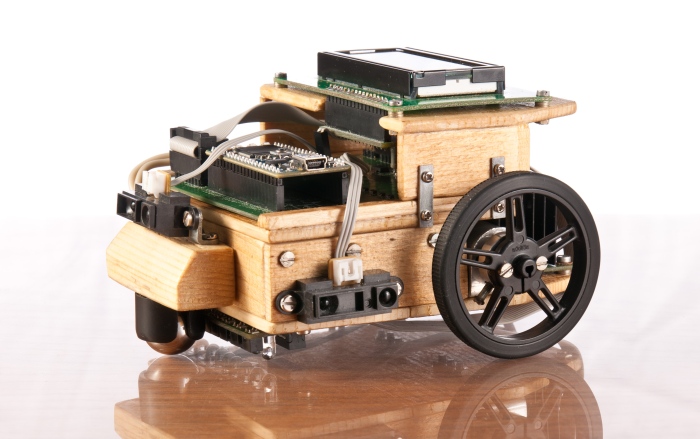
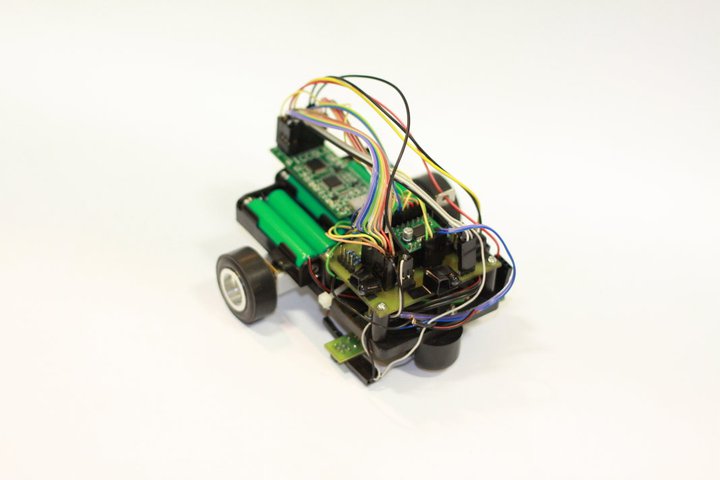
Robot Nite 1
Tento robot vznikal v rokoch 2010 a 2011. Bol určený pre kategóriu Linefollower / Stopár, čiže bol prispôsobený na sledovanie čiary. Tú snímal radom infračervených senzorov umiestnených v prednej spodnej časti robota. Taktiež dokázal rozpoznať prekážku na dráhe a inteligentne ju...sponzori a partneri



